ReefWorks Marine Synthetic Environment
Comprehensive Simulation with Real World Impact
Pipar is developing a Marine Synthetic Environment (MSE) and Digital Twin concept demonstrator for the Australian Institute of Marine Science's (AIMS) ReefWorks test range. It is a real-time simulation platform that lets researchers and engineers test, plan, and evaluate uncrewed marine vehicles in a realistic virtual reef environment.
The Goal
The ReefWorks MSE provides a simulation environment for users to test their autonomous surface and underwater vessels before undertaking on-water testing on the ReefWorks Test Range. Testing in simulation enables engineers and researchers to identify issues and predict performance without the logistical challenges of real-world deployments. Resolving potential issues in simulation dramatically increases the efficiency of on-water testing time.
For AIMS's existing fleet of autonomous vessels, the MSE is a platform for performance prediction, hardware-in-the-loop testing, and training. Operators can simulate missions in a variety of environments and use the results to design survey campaigns optimised for the current or predicted conditions.
The ultimate goal is to extend the concept demonstrator into a full-scale digital twin that visualises conditions and vessels in real-time, giving the ReefWorks operational team a comprehensive picture of activity across the test range.
The Approach
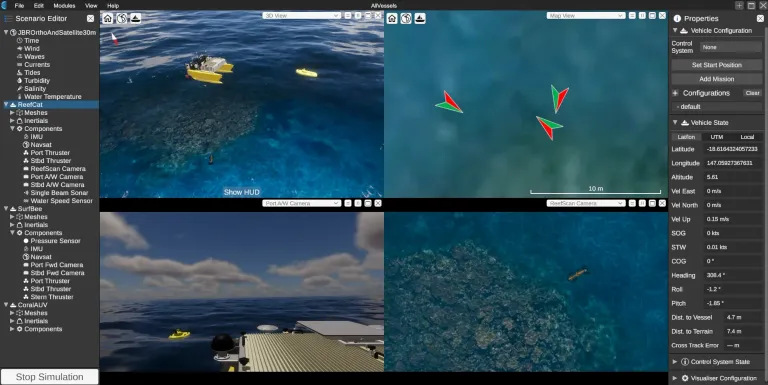
Pipar's approach to the ReefWorks MSE drew heavily on experience gained during the design and delivery of the AIMS ReefCat ASV, which required the development of many of the same core simulation and monitoring capabilities. Rather than starting from scratch, the team extended and generalised this existing foundation into a platform capable of supporting any uncrewed surface or underwater vehicle.
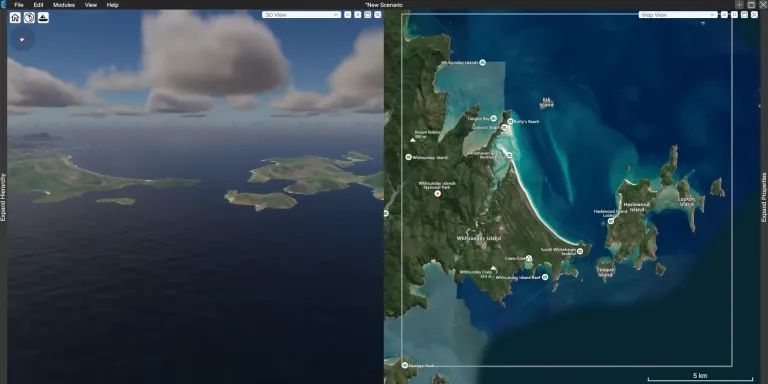
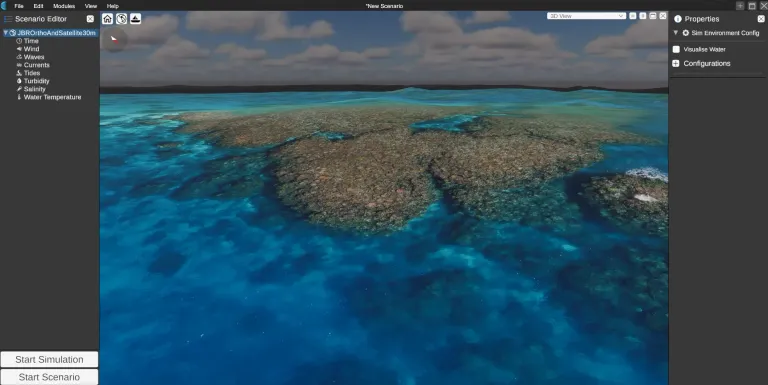
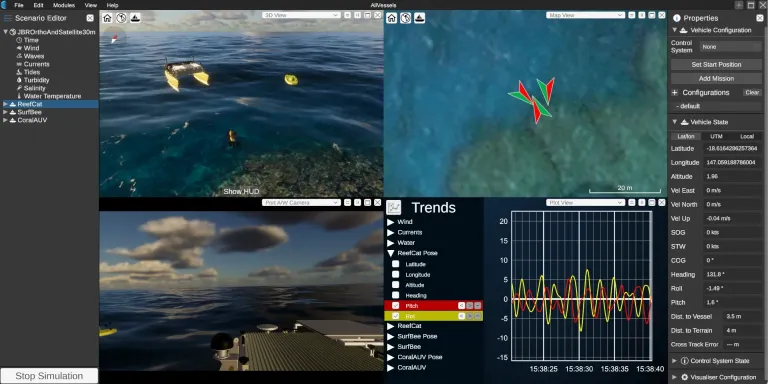
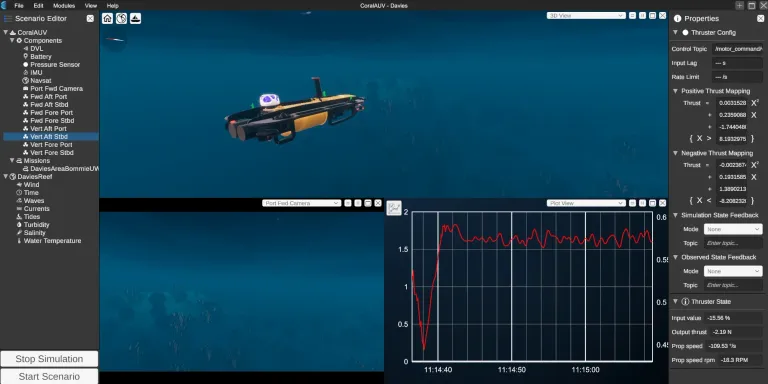
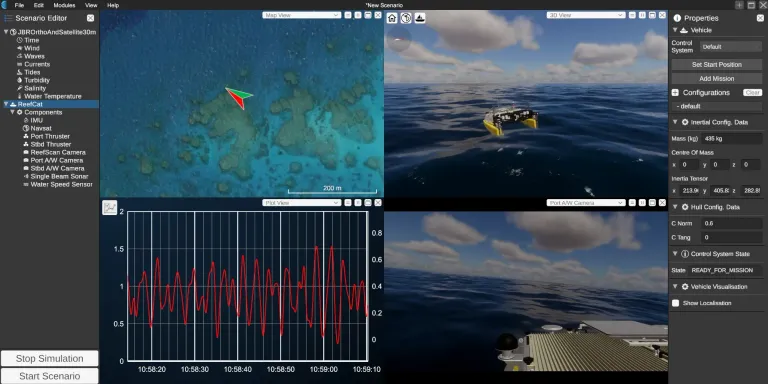
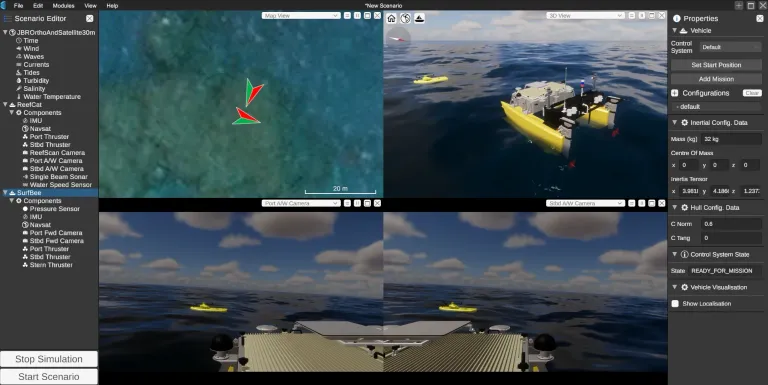
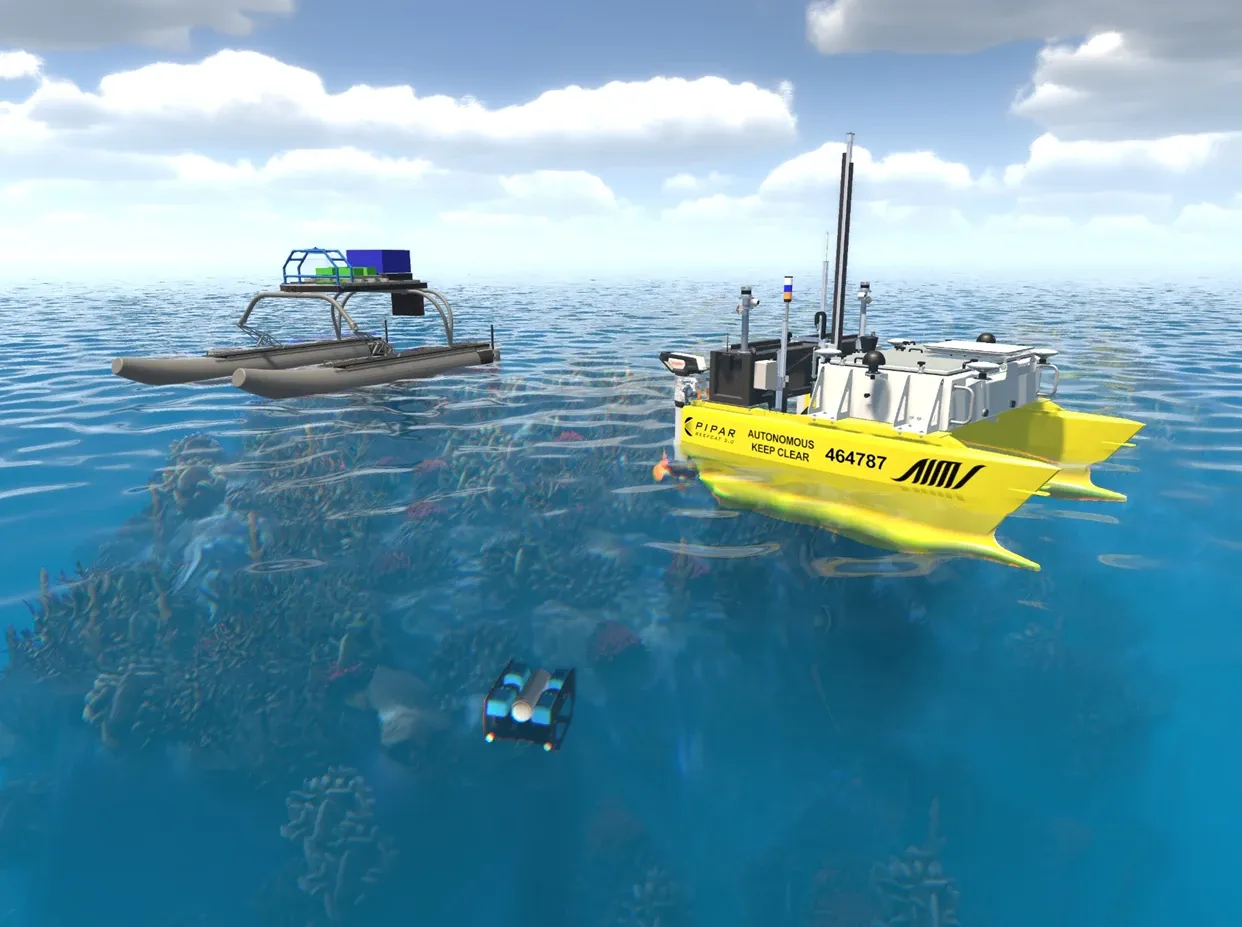
The solution is built around Pipar's proprietary CFD-based hydrodynamic engine, a GPU-accelerated solver that calculates forces on a vessel's hull in real time. This engine, originally developed for the ReefCat design process, was extended to support fully submerged vehicles, aerodynamic forces, and enhanced wave modelling, enabling accurate simulation of both surface and underwater platforms in the same environment. Environments are built from real-world bathymetric data, with wave, tidal, and wind conditions generated from measured site data to accurately represent the ReefWorks test range.
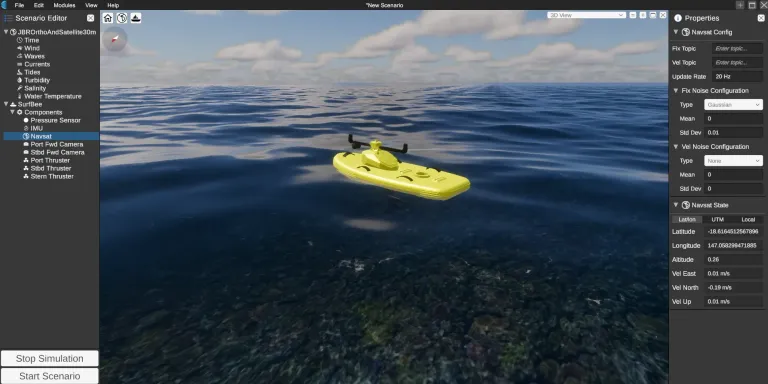
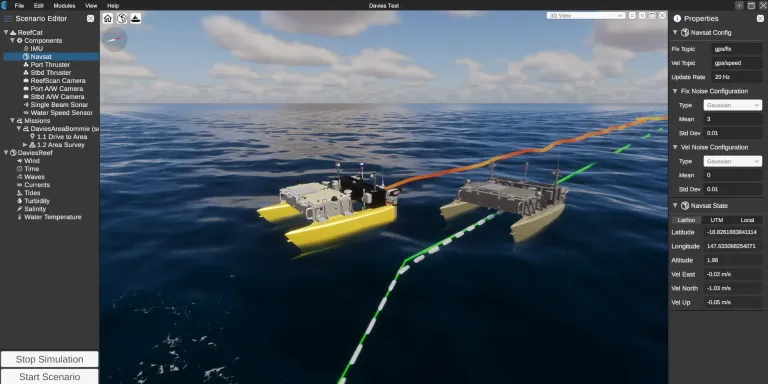
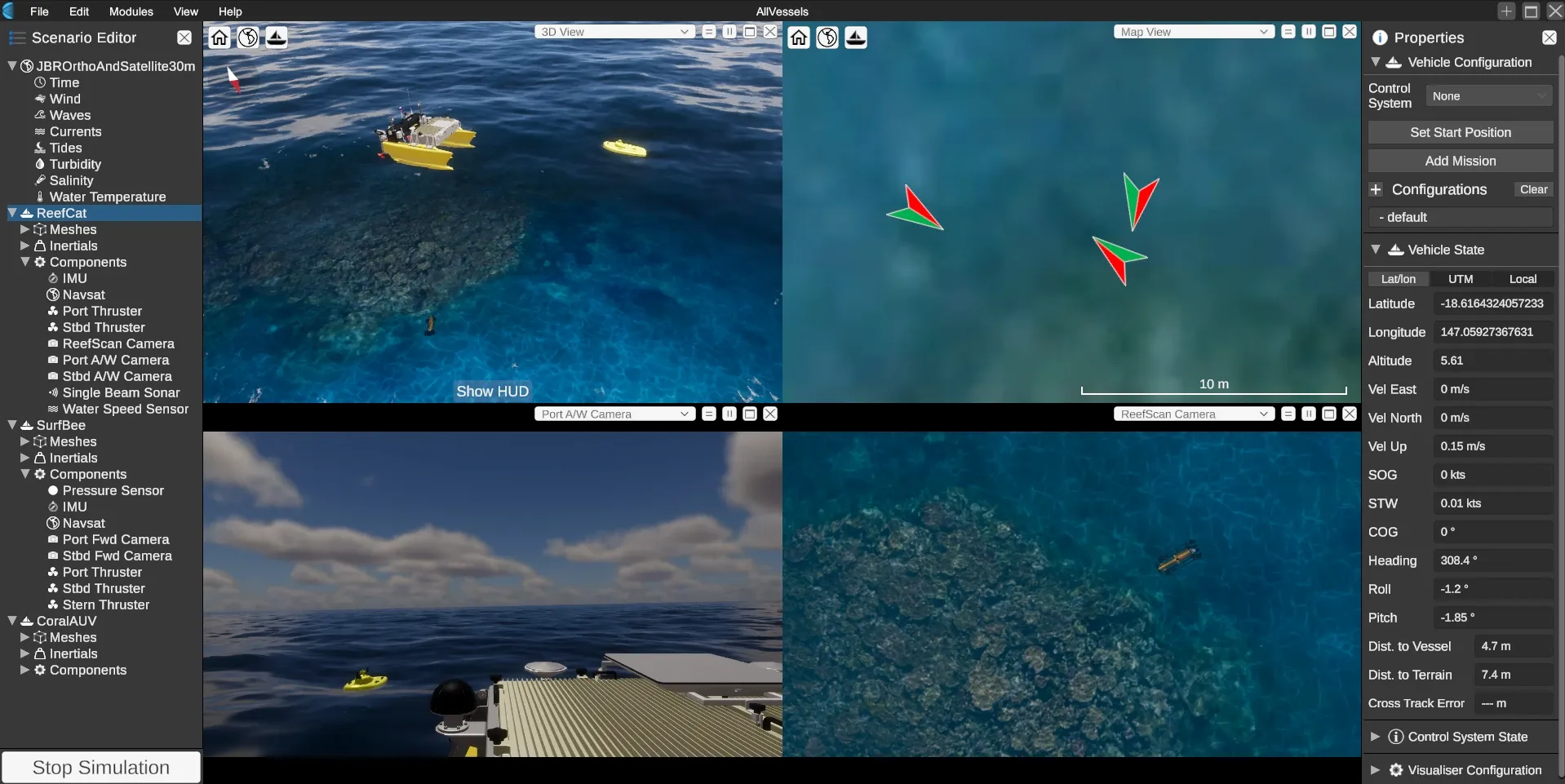
Users can create their own vehicles and environments from real-world or synthetic data, tailoring the simulation to their specific needs. Vehicles are defined by uploading hull geometry, inertial properties, and propulsion configuration, with a suite of supported sensors including cameras, lidar, sonar, GNSS, and IMU. Each sensor can be configured with realistic noise characteristics, ensuring that control systems developed in simulation are robust to the behaviour of their real-world counterparts. On the environment side, users can load bathymetric terrain from survey data or generate it synthetically, and configure wave, tidal, and wind conditions either manually or from real-world recorded data. Water properties such as turbidity and density, time of day, and weather can all be adjusted, giving users precise control over the conditions their vehicle will face.
The platform was developed collaboratively with AIMS throughout, with modular deliveries allowing feedback to be incorporated at each stage. The result is a scalable architecture that supports the full workflow from mission planning and simulation through to scenario monitoring, playback, and performance evaluation. This foundation is designed to grow with AIMS's needs, providing a clear pathway toward a full-scale digital twin of the ReefWorks Test Range.
Project Gallery